
Giỏ hàng của bạn hiện chưa có sản phẩm nào

Giỏ hàng
0 sản phẩm
Danh mục
Tin tức khác

Bảng so sánh chi tiết 3 sản phẩm: EcoFlow DELTA 2, DELTA 3 và DELTA 3 Plus
Xem chi tiết

DJI Osmo Mobile SE vs Osmo Mobile 6 vs Osmo Moblie 7 và Osmo Mobile 7P
Xem chi tiết

Tay cầm hoàn toàn bằng nhôm cho máy ảnh Sigma BF
Xem chi tiết

Sigma BF: Tối Giản Hết Mình, Chụp Ảnh Đỉnh Cao
Xem chi tiết

Nintendo Switch 2: Bom tấn 2025 cho game thủ - Ngày ra mắt, tính năng mới và những lưu ý quan trọng
Xem chi tiết

DJI Mavic 4 Pro: Những tin đồn mới nhất trước ngày ra mắt
Xem chi tiết

So sánh DJI Flip vs DJI Mini 4 Pro
Xem chi tiết
Sigma BF: Máy Ảnh CNC Nguyên Khối Sản Xuất Giới Hạn Chỉ 9 Chiếc/Ngày
Xem chi tiết

So sánh Ecoflow thế hệ 2 và thế hệ 3 - Bước đột phá về công nghệ
Xem chi tiết
FPV cho người bắt đầu - Kiến thức cơ bản
- Cập nhật : 11-12-2020 09:31:12
- Đã xem: 6488

Chào mừng bạn đến với thế giới FPV
Nếu bạn đang ở đây để đọc điều này, thì điều gì đó đã truyền cảm hứng cho bạn thực hiện một nghiên cứu nhỏ về đa hệ FPV khi là người mới bắt đầu FPV. Có thể hơi đáng sợ khi bạn mới bắt đầu, nhưng hãy kiên trì với nó, phần thưởng vượt xa những thử thách. Loạt bài viết này ở đây để giúp bạn định hướng con đường của mình vượt qua những thách thức đó và cung cấp cho bạn cái nhìn sâu sắc về những gì bạn cần biết để tiếp tục. Mặc dù không bao gồm tất cả, nhưng bạn sẽ có một nền tảng kiến thức tốt để bắt đầu với tư cách là Người mới bắt đầu FPV.
FPV là gì ? Đơn giản hóa cho người mới bắt đầu FPV.

FPV là trải nghiệm độc đáo nhất khi tương tác với máy bay của bạn thông qua một mức độ đắm chìm không gì sánh được bằng bất kỳ thứ gì trong thực tế ảo. Ở dạng cơ bản nhất, nó đưa bạn, phi công, và chuyển ý thức thị giác của bạn vào cơ thể của một cỗ máy bay nhanh, nhanh nhẹn và chính xác. Nó mang đến cho bạn một cái nhìn hoàn toàn mới và đầy cảm hứng về thế giới xung quanh bạn mà chỉ những người bay FPV mới có thể trải nghiệm. Có khoảng ba trường phái bay đa động cơ FPV khác nhau; FPV bay đua ( FPV Racing ) , Bay tự do ( Freestyle ) và Bay Quay Film ( Cinematic Fpv ) . Và giới hạn là không có , bạn có thể chơi FPV theo cách mà bạn thích , hoặc chơi cả 3 cách trên !
Freestyle Flying
Bay tự do là tất cả về môi trường của bạn, multirotor của bạn và sự tương tác giữa hai điều này. Nó có thể là tìm ra khoảng trống mới mà multirotor của bạn khó có thể vượt qua, né tránh những cành cây ma khi bạn nhảy qua công viên địa phương, tìm những địa điểm mới thú vị để khám phá hoặc cuối cùng tìm hiểu mẹo mới mà bạn đã thấy trên video chuyến bay của ai đó. Freestyle là một hình thức thể hiện trong chuyến bay, tập trung hơn vào các động tác nhào lộn và khám phá môi trường của bạn. Freestyle cũng có thêm lợi ích là giúp bạn chuẩn bị cho cuộc đua bằng cách đẩy các giới hạn của đa ô của bạn thông qua kiểm soát học tập. Là một người mới bắt đầu FPV, đây rất có thể là nơi bạn sẽ bắt đầu trong hành trình của mình!
Racing Fpv
Đua FPV bao gồm bay một mình hoặc với một nhóm phi công khác, vượt qua một loạt chướng ngại vật, cờ và cổng. Như với tất cả các cuộc đua, mục tiêu là giành vị trí đầu tiên, bằng cách đánh bại tất cả các phi công khác để về đích hoặc có được thời gian tốt nhất trên đường đua. Mặc dù điều này thoạt nghe có vẻ đơn giản nhưng hầu hết các chặng đua sẽ không chỉ đẩy giới hạn về tốc độ mà còn kiểm tra khả năng điều khiển của bạn thông qua tất cả các khía cạnh kiểm soát. Nhiều cuộc đua đi xuống xem ai có phản xạ nhanh nhất và có thể tìm ra đường tốt nhất trong đường đua.
Aerial Photography ( Cinematic Fpv )
Quay phim Cinematic Fpv không chỉ có vậy, xem và ghi lại bất cứ chủ đề nào bạn chọn là từ không trung. Đây là một cách tuyệt vời để khám phá thế giới xung quanh bạn và mang đến cho bạn trải nghiệm độc đáo về việc đưa các thước phim của bạn lên một cấp độ hoàn toàn mới với những góc bay hiểm hóc , chui luồn , bay các khu vực không GPS vv.. Góc máy FPV khác xa hoàn toàn góc máy Flycam có thể đem lại
Tự mình ráp FPV Drone - Hay mua FPV Drone ráp sẵn ?
Đó là câu hỏi của nhiều chơi FPV lần đầu tiên … Vậy mua sẵn hay tự ráp ? - Tất cả phụ thuộc vào thời gian của bạn , vì các nhà sx FPV có những cấu hình cực tốt cho từng Frame FPV drone của mình. Tuy nhiên một lời cảnh báo; bạn sẽ làm hỏng Fpv Drone của bạn…. rất rất nhiều lần. Đôi khi, một bộ phận sẽ không thể sống sót khi va chạm, hoặc dây dẫn sẽ bị lỏng và trừ khi bạn am hiểu về thiết bị điện tử, bạn có thể không biết cách tiến hành sửa chữa , chính vì vậy mua hay tự ráp Fpv Drone , bạn đều cần đọc - hiểu cấu tạo cũng như tự trạng bị cho mình các công cụ để sửa chữa : Mỏ Hàn - Tô Vít - Các loại ốc thay thế ( M2-M3 ) vv....
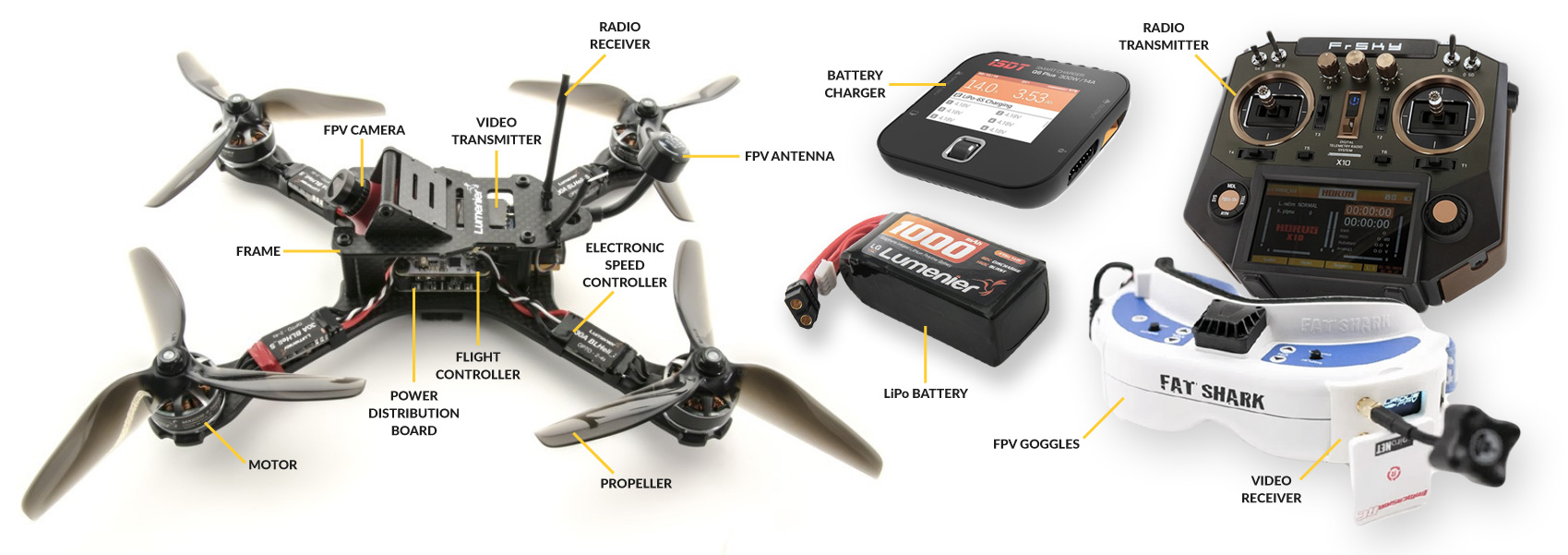
Các thành phần của Multirotor: FPV Beginner
Các bộ phận và thành phần của động cơ đa năng FPV có thể được chia thành ba loại riêng biệt, hệ thống điều khiển bay, hệ thống điện và hệ thống truyền tín hiệu FPV.
Hệ thống bay bao gồm động cơ, cánh quạt, bộ điều khiển tốc độ điện tử (ESC’s), bộ điều khiển chuyến bay ( Flight Controller ) và bộ sóng điều khiển ( RX )
Hệ thống điện bao gồm pin và bảng phân phối điện. ( Battery - PBD )
Hệ thống FPV chứa camera bay, bộ phát video (VTx) và ăng-ten.
Tất cả các thành phần của bạn được gắn trên khung multirotor của bạn ( Hay còn gọi là FRAMES )

Frames Fpv - Link các Frames Nexshop có sẵn
Frames là xương sống, bộ xương của multirotor của bạn. Đây là những gì tất cả các thành phần của bạn sẽ gắn kết và cuối cùng sẽ quyết định multirotor sẽ trông như thế nào. Có hàng trăm thiết kế khung ngoài kia, và nhiều phi công tạo ra khung tùy chỉnh của riêng họ phù hợp với phong cách bay cá nhân của họ. Các Frames được đo bằng milimét, không phải từ trước ra sau, mà là theo đường chéo từ tâm của giá gắn động cơ trên một cánh tay ( ARM ) đến tâm của giá gắn động cơ trên cánh tay theo đường chéo trực tiếp từ nó. Điều này sẽ cung cấp cho bạn một số thông tin chung về tổng thể của Frames sẽ lớn như thế nào để bạn biết điều gì sẽ xảy ra. Nó cũng sẽ cung cấp cho bạn một số thông tin chi tiết về việc khung có ý nghĩa như thế nào đối với cánh quạt
Hầu hết các khung sẽ cho bạn biết kích thước cánh quạt được thiết kế cho nó : Frame 5 inch ( Dùng cánh 5 inch code 5xxx ). Frame 3 inch ( Dùng cánh 3 inch code 3xxx ) - Frame 2.5inch - Frame 2inch và các Frame Tiny cỡ nhỏ
Frames thường được thiết kế với mục đích cụ thể, có thể là đua xe hoặc tự do. Mặc dù bạn CÓ THỂ làm cả hai với bất kỳ loại khung hình nào, hiệu suất thường sẽ thiên về một loại khung. Đây là điều cần lưu ý khi chọn khung của bạn.
1.1 Thành phần hệ thống bay: FPV cho người bắt đầu.
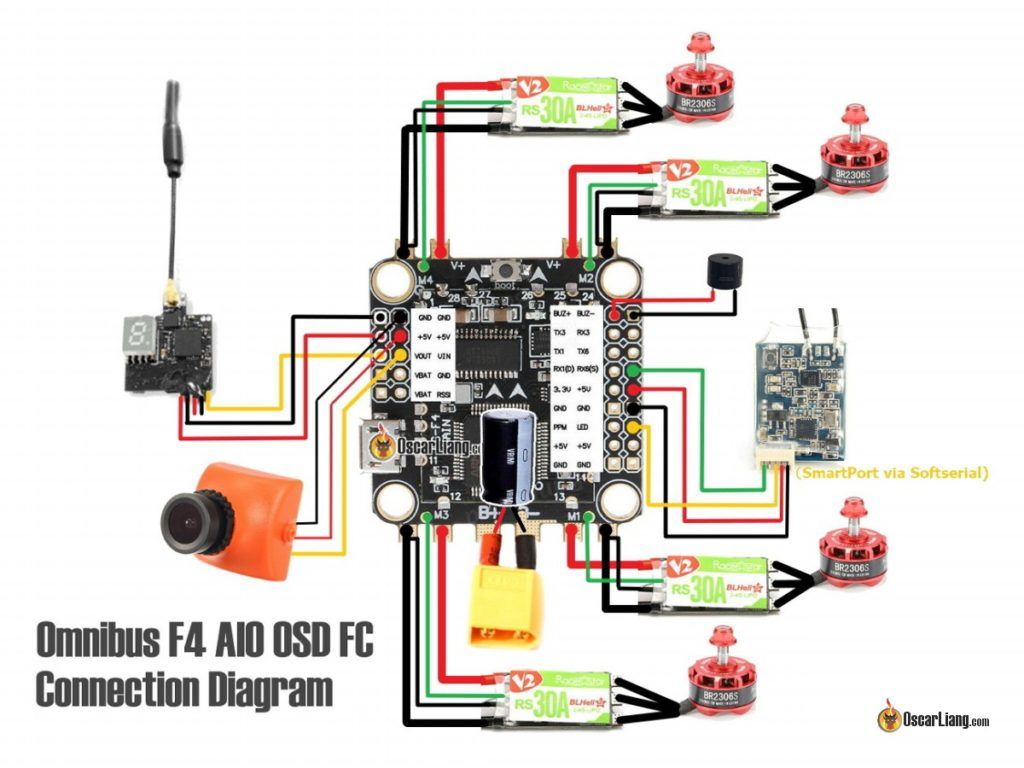
Bộ điều khiển chuyến bay ( Flight Controller ) - FC
Bộ điều khiển chuyến bay ( FC ) về cơ bản là bộ não của động cơ đa năng của bạn và là thành phần phức tạp nhất của hệ thống bay. Tích hợp trong FC là các cảm biến cho phần trên bo mạch biết hướng của multirotor, đồng thời nhận đầu vào từ pilot và sử dụng hai bộ dữ liệu, gửi lệnh đến động cơ để di chuyển multirotor theo lệnh. Bộ điều khiển máy bay là những phần thiết bị phức tạp có thể được lập trình ở các mức độ khác nhau để điều chỉnh cơ bản chiếc quad của bạn giống như bạn làm với một chiếc xe đua. Bạn cũng có thể xác định mức độ kiểm soát mà bạn muốn cung cấp cho bộ điều khiển chuyến bay của mình trên đa cảm biến, chẳng hạn như cho phép nó tự động điều chỉnh mức quad của bạn khi không có lệnh. Tuy nhiên, hầu hết các phi công lái FPV đều bay ở chế độ gọi là “Acro” không cho phép FC điều khiển quad ngoài đầu vào của người dùng, Quad chỉ về chế độ tự động bay khi phi công mất quyền điều khiển Quad , mất tín hiệu hình ảnh / mất tín hiệu điều khiển ( FailSafe Mode ) - Quad nếu được lập trình + Được trang bị GPS , FC sẽ điều khiển để quad bay về vị trị HomePoint theo setup trước từ phần mềm nạp vào.

ESC là các thành phần mạnh mẽ trên Quad, ESC lấy các lệnh đầu ra từ bộ điều khiển máy bay (FC ) và chuyển nó thành lệnh cho các động cơ , ESC cho Motors biết tốc độ quay, hướng quay và thời điểm dừng.
ESC điều này bằng cách lấy điện từ hệ thống điện và dữ liệu từ FC và biến nó thành xung điện ba pha mà động cơ cấp nguồn.Bằng cách cung cấp nhiều hơn hoặc ít năng lượng hơn, động cơ quay nhanh hơn hoặc chậm hơn theo phản ứng. Mỗi động cơ của multirotor có một ESC chuyên dụng để điều khiển nó vì trong hệ thống bay multirotor, mỗi động cơ hầu như luôn quay ở tốc độ khác với các động cơ đối tác của nó. Điều này là do đặc điểm bay nhiều hành trình, cân bằng và các ảnh hưởng bên ngoài như gió. Giống như bộ điều khiển chuyến bay, ESC có Firmware riêng và được update thường xuyên để tăng hiệu xuất làm việc.

Động cơ ( Motors )
Động cơ cung cấp sức mạnh đưa multirotor của bạn lên không trung. Hầu hết các động cơ được phân loại là động cơ không chổi than và hoạt động bằng cách sử dụng nguồn ba pha để điều khiển nam châm điện làm quay động cơ. Mặc dù tương đối nhỏ, động cơ không chổi than khá mạnh mẽ. Những động cơ này đã được sử dụng trong ngành hàng không mô hình trong nhiều năm và là thành phần sử dụng nhiều năng lượng nhất từ hệ thống FPV của bạn.
Động cơ được đánh giá bằng hai số kích thước cho phép bạn chọn kích thước bạn cần cho đa động cơ của mình, cũng như xếp hạng Kv, được định nghĩa là RPM của động cơ trên mỗi volt. Ví dụ: nếu bạn có một động cơ 2206 - 2450kv (một động cơ rất phổ biến cho Quad 5 inch ), 22 là viết tắt của đường kính của động cơ, chiều dài tính bằng milimét xung quanh bên ngoài của vỏ động cơ. 06 là viết tắt của chiều cao của vỏ động cơ tính bằng milimét. Nếu bạn đang chạy pin 4 cell, điện áp danh định sẽ là 14,8 volt. Kv là 2450 và nhân với 14,8, cho bạn RPM là 36,260. Đây sẽ là RPM tối đa khi không tải, nghĩa là không gắn cánh quạt.
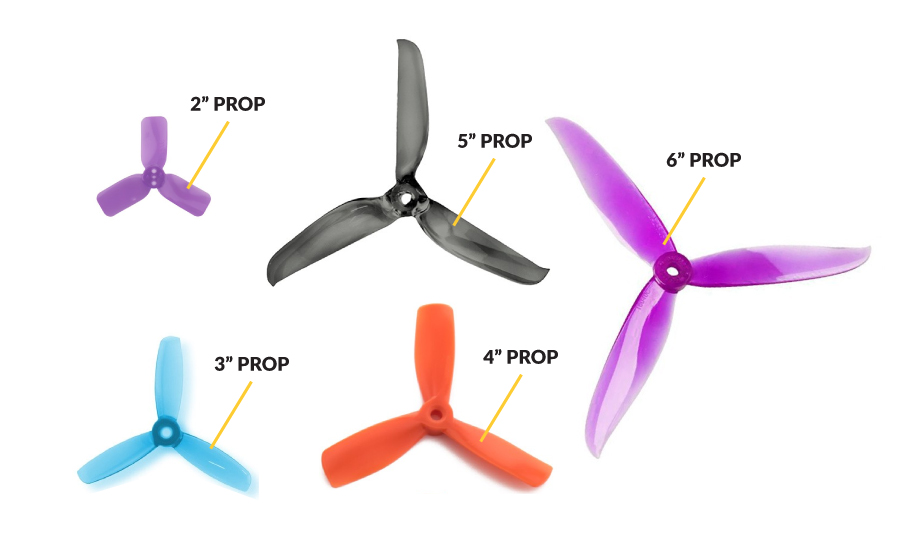
Cánh quạt
Cánh quạt cung cấp lực đẩy của hệ thống bay. Được gắn trực tiếp vào động cơ thông qua trục động cơ, chúng quay nhanh như động cơ. Có rất nhiều, rất nhiều kiểu dáng và kích cỡ khác nhau, tất cả đều được làm bằng các vật liệu khác nhau, độ cao lưỡi khác nhau, hình dạng lưỡi khác nhau và số lượng lưỡi khác nhau. Cánh quạt được đánh giá về kích thước, số lượng lưỡi và bước lưỡi.
Ví dụ: nếu bạn có một cánh quạt 5 x 4,5 x 3, thì bạn có một cánh quạt 5 inch, với độ cao 4,5 ’’, với tổng cộng 3 cánh quạt. Cao độ được xác định là khoảng cách mà cánh quạt sẽ di chuyển về phía trước trong một vòng quay. Trong trường hợp ví dụ của chúng tôi, nó sẽ di chuyển về phía trước 4,5 ”. Vì vậy, tất cả mọi thứ đều bình đẳng, một cánh quạt 3 ”sẽ không tạo ra nhiều lực đẩy như kích thước 4,5” của chúng ta khi quay ở cùng một tốc độ. Vật liệu làm cánh quạt cũng sẽ ảnh hưởng đến độ bền của cánh quạt khi nó va vào vật gì đó chẳng hạn như cành cây hoặc mặt đất, vật liệu cũng làm thay đổi trọng lượng của cánh quạt. Quay một giá đỡ nặng hơn cũng sẽ tiêu tốn nhiều năng lượng hơn từ động cơ đa năng của bạn, vì vậy bạn phải tìm sự cân bằng phù hợp khi chọn cánh.

Bộ thu sóng vô tuyến ( RX ) - Radio Receiver và bộ điều khiển vô tuyến hay còn gọi là Tay cầm điều khiển ( Remote Controller ).
Bộ thu vô tuyến (Rx) là bộ phận nhận lệnh từ Tay cầm điểu khiển ( Radio Transmitter ) và đưa thông tin đó vào Bộ điều khiển bay ( Flight Controller ).
Có rất nhiều thương hiệu / chuẩn điều khiển vô tuyến như : Frsky , Flysky , Futaba , TBS ( TeamBlackSheep ) và mới hất là sóng Digital DJI
Frsky và Flysky thường được dùng trong những chiếc Quad giá rẻ , phạm vi bay thấp
TBS và DJI là 2 sóng vô tuyến được đánh giá tốt nhất hiện nay , đặc biệt TBS cho khả năng truyền sóng phải nói là tốt nhất !
1.2 Thành phần hệ thống tín hiệu hình ảnh: FPV cho người bắt đầu.
Flight Camera
Camera truyền tín hiệu hình ảnh là bộ phận ghi nhận và truyền tín hiệu hình ảnh về Board sau đó Board sẽ thông qua bộ VTX ( Video Transmitter ) để truyền tín hiệu hình ảnh về Kính cho người điều khiển . Có rất nhiều loại camera FPV - phân biệt chủ yếu 2 loại chính : Camera cho hệ DJI ( Digital ). và Camera cho hệ Analog , ngoài ra các hãng cũng sản xuất camera dùng chung được cả 2 hệ .
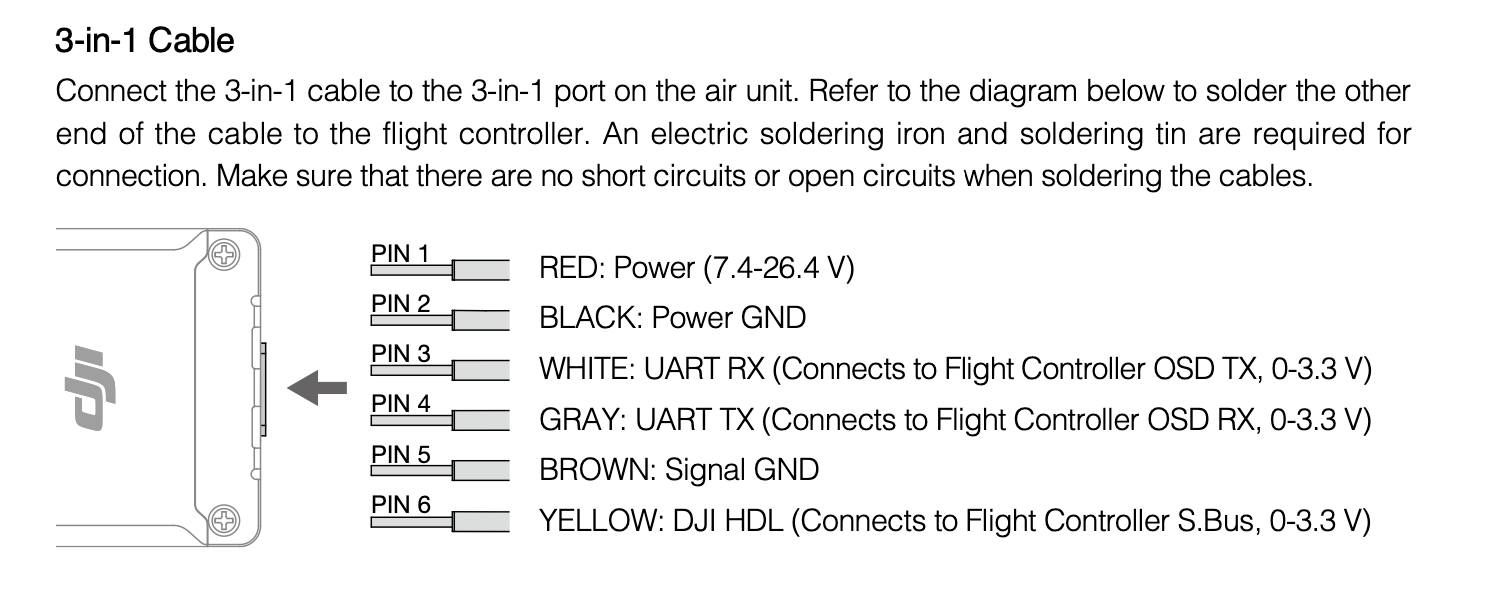
Video Transmitters (VTx’s)
VTx được đánh giá theo miliwatt (mW), điều này giúp phi công biết được VTx có thể truyền bao xa. Quản lý đúng cách VTx của bạn là một trong những điểm tốt hơn của việc học bay theo nhóm, cũng như cách cư xử tốt. Việc quản lý không tốt thành phần đơn lẻ này có thể dẫn đến tai nạn cho các phi công đồng nghiệp của bạn cũng như một số cảm giác tổn thương, vì vậy hãy cẩn thận.
GOGGLES ( Kính FPV )
Goggles Kính FPV của bạn là liên kết trực quan của bạn với multirotor FPV.
Mặc dù bạn có thể sử dụng trạm mặt đất và màn hình để điều khiển FPV, nhưng những phương thức đó không hấp dẫn như sử dụng một bộ kính GOGGLES
Có nhiều kiểu kính khác nhau, từ các phiên bản tự làm mà bạn có thể tự lắp ráp cho đến các mẫu kính sẵn sàng sử dụng với rất nhiều tính năng, chẳng hạn như khả năng DVR ( Ghi hình ảnh vào thẻ nhớ trên kính ) . Đeo kính khi bay bạn sẽ có cảm giác như chơi thực tế ảo, hình ảnh được hiển thị trên màn hình ngay trước mắt bạn, khiến bạn cảm thấy như mình là một phần của bạn đa chuyển động khi nó lướt nhanh trên bầu trời.
Trên kính thường được trang bị thành phần được gọi là Bộ thu video (VRx) giống như bất kỳ thành phần FPV khác, có nhiều kiểu và khả năng. Đi kèm với chúng là một ăng-ten, rất giống với ăng-ten được gắn vào VTx của bạn trên multirotor, nhưng lại có nhiều loại, kiểu dáng và công nghệ khác nhau để xác định khoảng cách bạn có thể bay quad từ vị trí của bạn.
HẾ THỐNG ĐIỆN - CUNG CẤP ĐIỆN NĂNG CHO FPV : FPV cho người bắt đầu
Mạch chia cấp điện
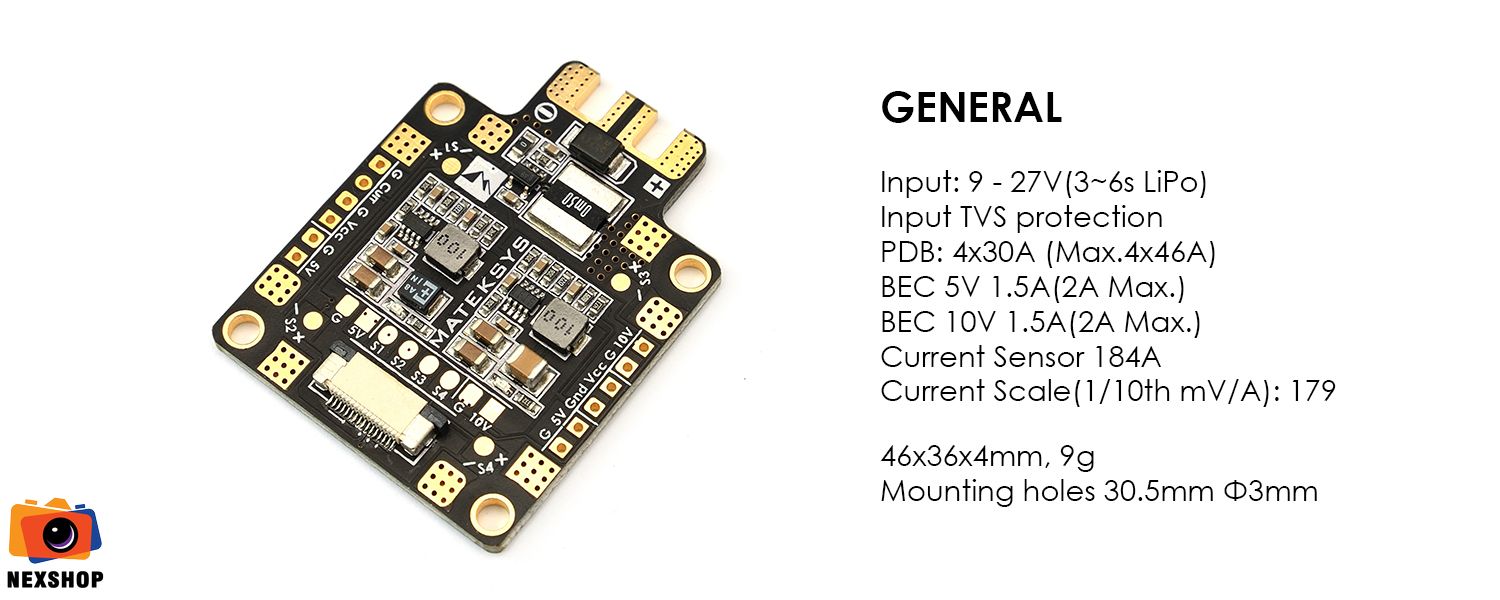
Bảng phân phối điện đã giúp đơn giản hóa rất nhiều việc đấu dây của multirotor. Cách đây không lâu, các thành phần multirotor nhận được sức mạnh của chúng nhờ một hệ thống phức tạp nối tất cả các thành phần trực tiếp lại với nhau trong một hệ thống được gọi là dây nịt, nhưng sau đó các bảng phân phối điện đã được ưa chuộng. Trên bo mạch, pin được nối với bo mạch thông qua một đầu nối và từ đó, tất cả các thành phần của bạn đều được kết nối với bo mạch. Bo mạch rất đơn giản cung cấp điện cho tất cả các thành phần. Có một số tính năng đối với một số bo mạch ngoài việc phân phối điện đơn giản, chẳng hạn như lọc điện năng giúp giữ cho nguồn điện đến các thành phần của bạn không bị “nhiễu”, cung cấp nguồn điện sạch hơn, đáng tin cậy hơn. Chúng cũng có các tính năng có thể cung cấp năng lượng ở các điện áp khác nhau cho các thành phần khác nhau, để giúp giữ cho các thành phần hoạt động hiệu quả ở mức điện áp tối ưu của chúng.
Batteries FPV - Pin FPV

Pin là nguồn năng lượng chính của multirotor của bạn và có thể có tác động rất lớn không chỉ đến thời gian bạn bay mà còn là tổng sức mạnh của multirotor. Multirotors thường được cung cấp bởi một công nghệ pin được gọi là pin lithium polymer, và được tạo thành từ các tế bào riêng lẻ. Mỗi ô có định mức điện áp là 3,7 vôn và bằng cách thêm nhiều ô vào pin, bạn sẽ thêm nhiều điện áp hơn. Nếu bạn còn nhớ cuộc trò chuyện của chúng ta ở trên về động cơ, thì tốc độ quay của động cơ phụ thuộc vào điện áp động cơ được cung cấp. Càng nhiều điện áp, động cơ có khả năng quay càng nhanh. Chọn đúng pin cũng là một hành động cân bằng rất tốt giữa trọng lượng và công suất. Bạn càng thêm nhiều trọng lượng vào multirotor, các chuyến bay càng ngắn và các động cơ càng phải đẩy nhiều trọng lượng hơn. Trong số tất cả các thành phần đơn lẻ, pin sẽ tăng trọng lượng nhiều nhất cho động cơ đa năng của bạn. Pin được đánh giá bằng cả điện áp và amp giờ. Giờ amp cho bạn biết thời lượng sạc trên pin sẽ kéo dài trong khi tải; amp giờ càng cao, chúng sẽ kéo dàiơn.
Bài viết được dịch từ ( https://www.getfpv.com/learn/new-to-fpv/fpv-beginner-guide/ )

Tác giả: Nexshop
NexShop là thương hiệu phân phối đồ công nghệ uy tín hàng đầu. Nơi mua sắm máy ảnh và các thiết bị công nghệ uy tín với đầy đủ các mặt hàng từ phụ kiện đến các dòng sản phẩm cao cấp. Thương hiệu có nhiều năm kinh nghiệm trong lĩnh vực công nghệ, ống kính, máy ảnh, thiết bị công nghệ,... NexShop phụ trách chuyên môn viết bài chia sẻ kiến thức mang đến những thông tin hữu ích cho bạn đọc.
Số điện thoại: 0868417786
Email: okharon@gmail.com
Địa chỉ: Số 10 - Ngõ 12 - Phố Trần Quý Kiên - Quận Cầu Giấy - Thành Phố Hà Nội"



















Liên hệ với chúng tôi
Chuyên máy ảnh, phụ kiện Sony Alpha Nex
- Địa Chỉ: Số 10 - Ngõ 12 - Phố Trần Quý Kiên - Quận Cầu Giấy - Thành Phố Hà Nội
-
0868417786
- Email: okharon@gmail.com
Thông tin
- Giới thiệu
- Hướng dẫn mua hàng
- Chính sách bảo mật
- Chính sách đổi trả và hoàn tiền
- Chính sách vận chuyển và giao nhận
- Chính sách thanh toán
- Cam kết
- Thông tin khuyến mại



Customer service
EXTRAS
Đồng hành cùng chúng tôi
Copyright 2024 Nexshop. All rights reserved.